- 最終更新日
- 記事公開日
【電子工作向け】ステッピングモーターとサーボモーターの違い・使い分け

ステッピングモーターとサーボモーターについて調べていると、検索に出てくるのは産業用・工業製品に向けての記事ばかりだったので、電子工作向け用に使うステッピングモーター・サーボモーターについて書いてみます。
「サーボモーターとステッピングモーター、どちらを選べばいいのか分からない」
「サーボモーターとステッピングモーターの性能や特徴の違いは何?」
という方、ぜひ参考にしてみて下さい。
※比較対象は、秋月電子で売ってる1,000円ぐらいののステッピングモーターとサーボモーターです。
特徴の違い
サーボモーターとステッピングモーターの大きな特徴は、指定の回転角で止めることができること。
では、どんな状況で使い分けをすればいいのか?
結論から言うと、
- 回転させる必要がある → ステッピングモーター
- 360度以上の回転は必要ないけど、高速&高トルクで動かす必要がある → サーボモーター
これが基準となります。
※「360度サーボ」というものも存在しますが、これは回転角を制御できるものではありません。指定の回転速度で回転し続けるモーターです。
ステッピングモーターの特徴
ステッピングモーターは、360度回転することができるので「2周目の60度の位置でストップ」「3周目の125度の位置でストップ」といった制御が可能です。
ただし、回転数を上げると、反比例してトルクが低下する特性を持っています。
最大スピードで回転させると、軽く手を当てるくらいで脱調(高負荷によりモーターの回転が止まってしまう事)してしまいます。
その反面、低速で動かしたときは非常に強いトルクを発揮します。
『低速でトルクが強い = その場にとどまる力が強い』という事でもあり、動いているものを止める役割に向いています。
(例:物を運搬するベルトコンベヤなど)
モーターを止めているときは常に電流を流し続けることになる為、電流の消耗が激しく、モーター本体が発熱します。
回路設計には一工夫が必要です。
サーボモーターの特徴
サーボモーターは、ステッピングモーターとは違い、高速で動かしてもトルクが落ちません。
そのため、重いものを早く動かす用途に向いています。
(例:ロボットのアーム等)
ただし、回転することはできません。
「180度でストップ」「125度でストップ」のように、360度以内で停止位置を指定する必要があります。
同じくらいのトルクを持つステッピングモーターと比べた場合、サーボモーターの方が軽く、値段も安いことが多いです。
制御方法の違い
360度以内で使うのであれば、ステッピングモーターとサーボモーター、どちらを使ってもプログラムで同じことができます。
ステッピングモーターは、1パルスで回転する角度が決まっています。
サーボモーターは、1パルスで回転する角度を自由に決められます。
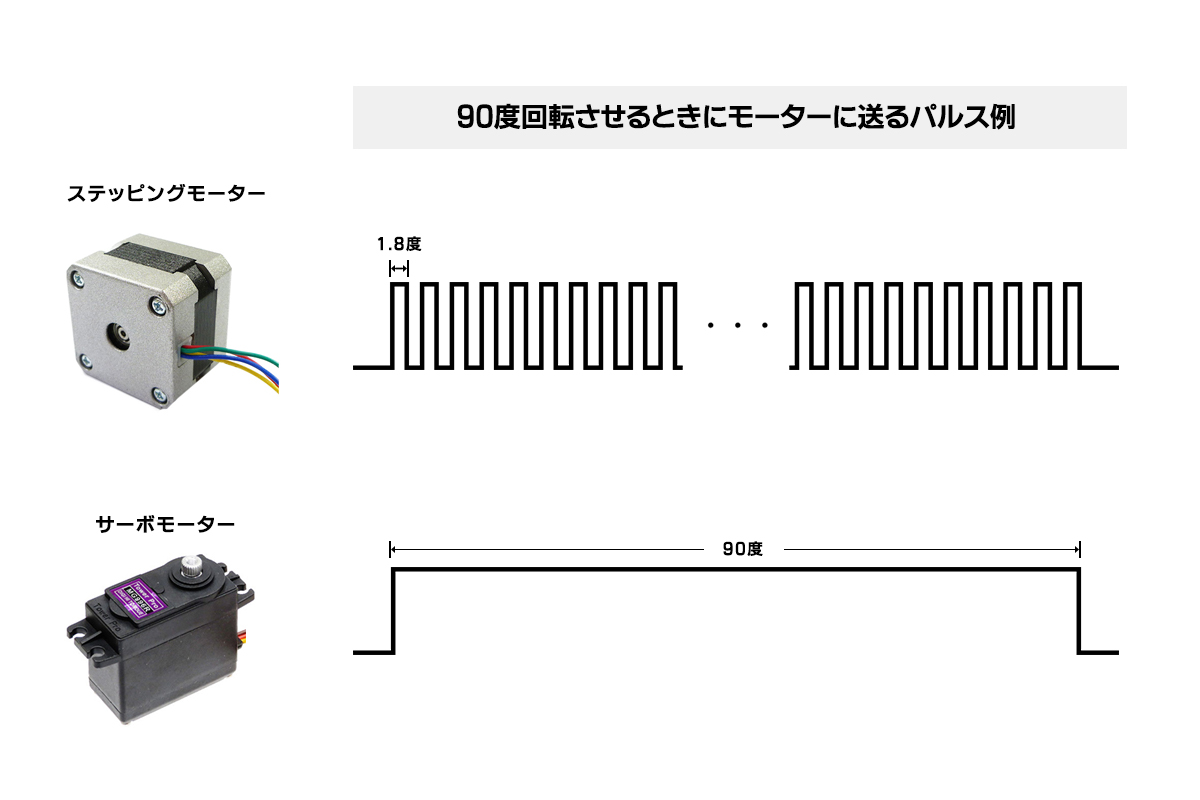
回転角の制御
例えば、90度回転させようとしたとき。
ステッピングモーターは「50回」パルスを送れば90度の位置まで移動します(1パルスで1.8度回転するとした場合)
対して、サーボモーターは「1回」パルスを送れば、90度の位置まで動きます。
回転スピードの制御
例えば、回転スピードを調整しようとしたとき。
ステッピングモーターは、周波数を低く(パルス幅を大きく)することで、回転スピードを遅く、周波数を高く(パルス幅を小さく)することで、回転スピードを速く調整できます。
対してサーボモーターは、1パルスで動く角度を小さく刻んで、パルスの途中に待機時間を挟むことスピード調整を行います。